Review of Linear Algebra
Graphics’ Dependencies
Basic mathematics
- Linear algebra
- calculus
- statistics
Basic Physics
- Optics
- Mechanics
Misc
- Signal processing
- Numerical analysis
A bit of Aesthetics
Vectors
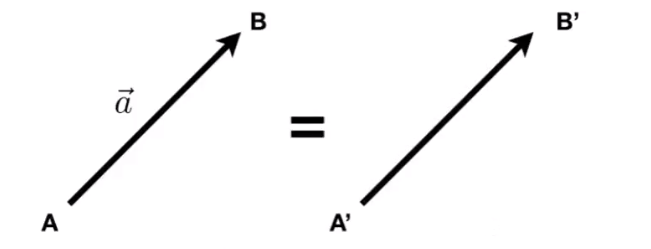
- Usually written as \(\vec{a}\) or in bold \(\textbf{a}\)
- or using start and end points \(\vec{AB} = B - A \)
- Direction and length
- No absolute starting position
Vector Normalization
-
Magnitude of a vector written as \( \vec{a} \) - Unit Vector
- A vector with magnitude of 1
-
Finding the unit vector of a vector (normalization): \(\hat{a} = \vec{a} / \vec{a} \) - Used to represent directions
Vector Addition
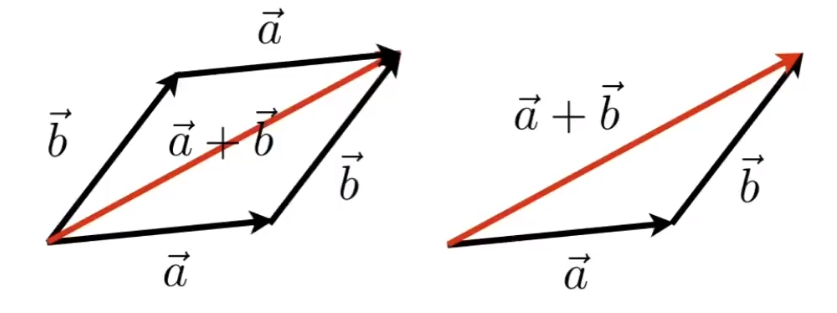
- Geometrically: Parallelogram law & Triangle law
- Algebraically: Simply and coordinates
Cartesian Coordinates
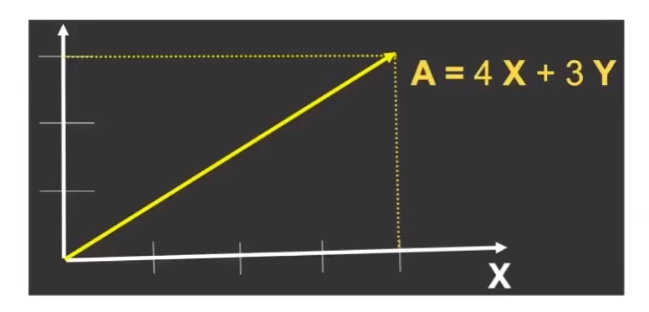
X and Y can be any (usually orthogonal unit) vectors
\[A\ =\ \begin{pmatrix} x\\ y \end{pmatrix}\ A^\top=(x, y)\ ||A|| = \sqrt{x^2 + y^2}\]Vector Multiplication
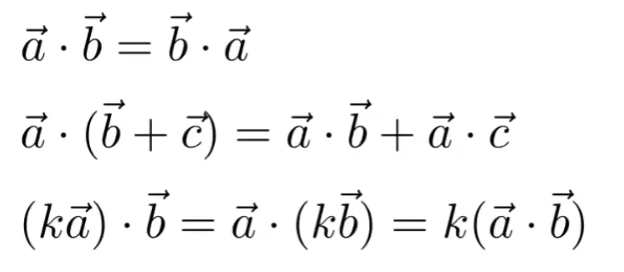
Dot Product
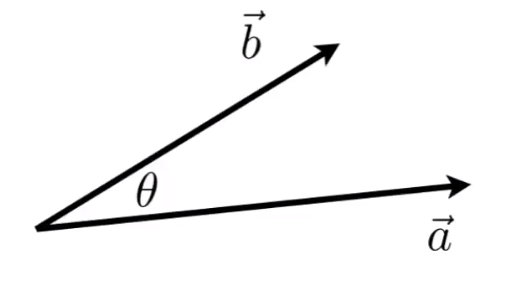
for unit vectors: \(cos \theta = \vec{a} \cdot \vec{b}\)
Properties:
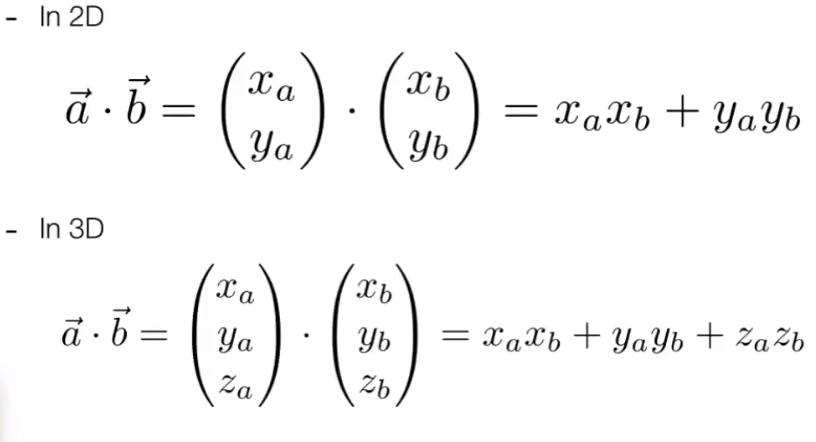
Component-wise multiplication, then adding up:
Applications in Graphics:
- Find angle between two vectors
- cosine of angle between light source and surface
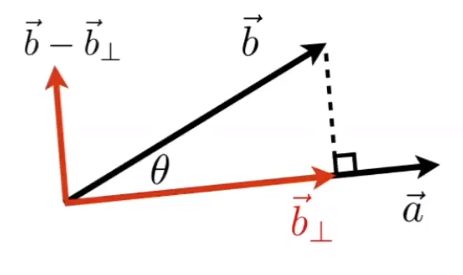
- Finding projection of one vector on another
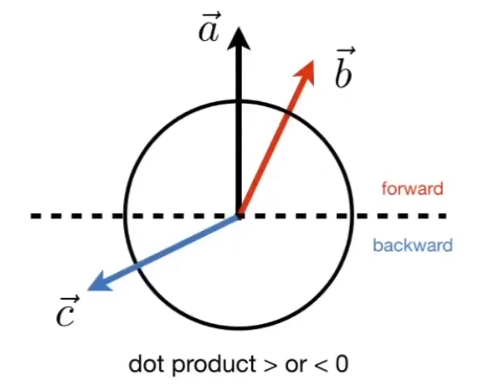
- Measure how close two directions are
- Decompose a vector
- Determine forward/backward
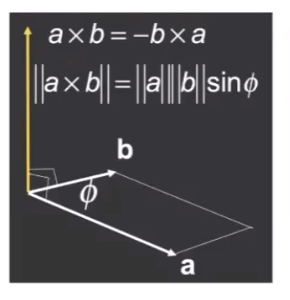
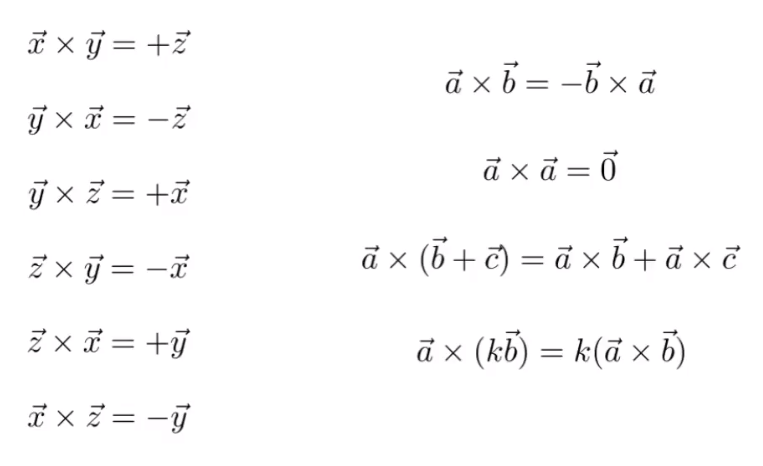
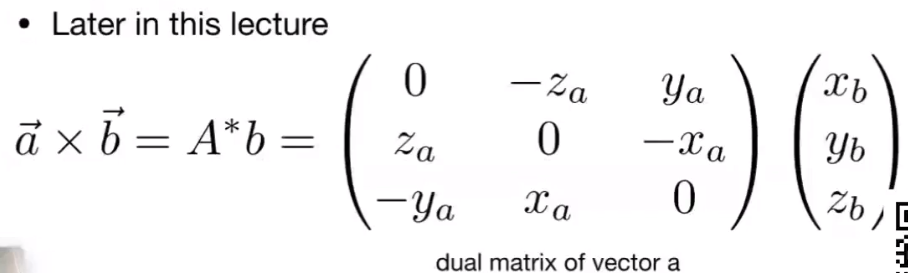
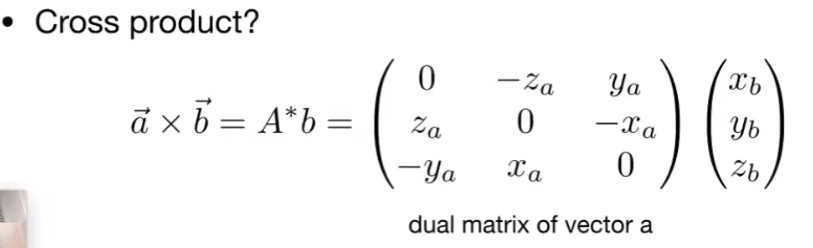
Cross Product
- Cross product is orthogonal to two initial vectors
- Direction determined by right-hand rule
- Useful in constructing coordinate system
Applications in Graphics:
- Determine left/right
- Determine inside/outside
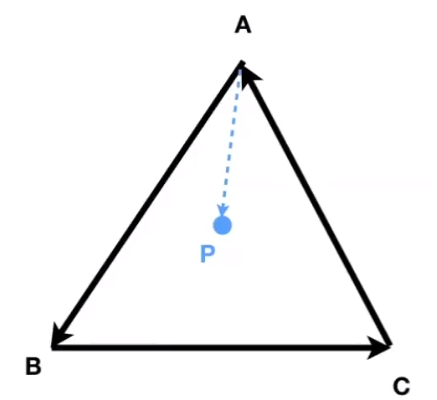
The point P is always in the left (right) of three sides. So P is inside the triangle.
Matrices
- In Graphics, pervasively used to represent transformations
- Translation, rotation, shear, scale
- Array of numbers
- Addition and multiplication by a scalar are trival
Matrix-Matrix Multiplication
- columns in A must equal to rows in B
- Element (i, j) in the product is the dot product of row i from A and column j from b
- Non-commutative
- Treawt vector as a column matrix
- Key for transforming points
Assignment 0
Question: Given a point \(P=(2,1)\), rotate \(45\) degrees counterclockwise about the origin, then translate \((1, 2)\). Calculate the coordinates of the transformed point.
Solution:
#include<cmath>
#include<iostream>
// Import Eigen Library
#include<eigen3/Eigen/Core>
#include<eigen3/Eigen/Dense>
using namespace std;
using namespace Eigen;
int main(){
// Input 2D Point
Vector2f P(2.f, 1.f);
// Rotation Angle to Rad conversion
float angle = 45;
const float a2r = acos(-1) / 180.0f;
float rad = angle * a2r;
// Affine Matrix M
Matrix3f M;
M << cos(rad),-sin(rad),1,
sin(rad),cos(rad),2,
0,0,1;
/*
M = [
cos(θ), -sin(θ), X,
sin(θ), cos(θ), Y,
0, 0, 1
] */
// Temp 3D Point
Vector3f tmp;
tmp << P.x(), P.y(), 1.f;
tmp = M * tmp;
Vector2f result(tmp.x(), tmp.y());
cout << result << endl;
return 0;
}
FEATURED TAGS
Computer Vision
Colorization
Deep Learning
Papers
Technical Writing
Computer Graphics
Tutorials
Mathematics
Graph Neural Network
Biomedical
Natural Language Processing
Graph Theory
Neural Network
Reinforcement Learning
Markov Decision Process
Paper Reading
Games
GVGAI
VGDL
MCTS
Clustering
Unsupervised Machine Learning
Social Science